Yagi Lab. @ Ibaraki University
| top | Research | Member | Publication | Link |
研究テーマの概要
制御工学をベースに、人や生物の身体と運動特性を知り、ロボットの制御を考える研究をしています。
■人の足関節
人の歩行は足関節の固さや柔らかさの調節を通じて安定化されています。
この調節の仕方を数値化して歩行アシストロボットやリハビリテーションへ応用することを目指しています。


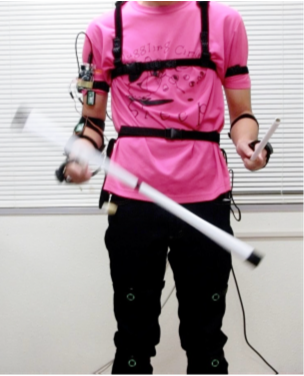
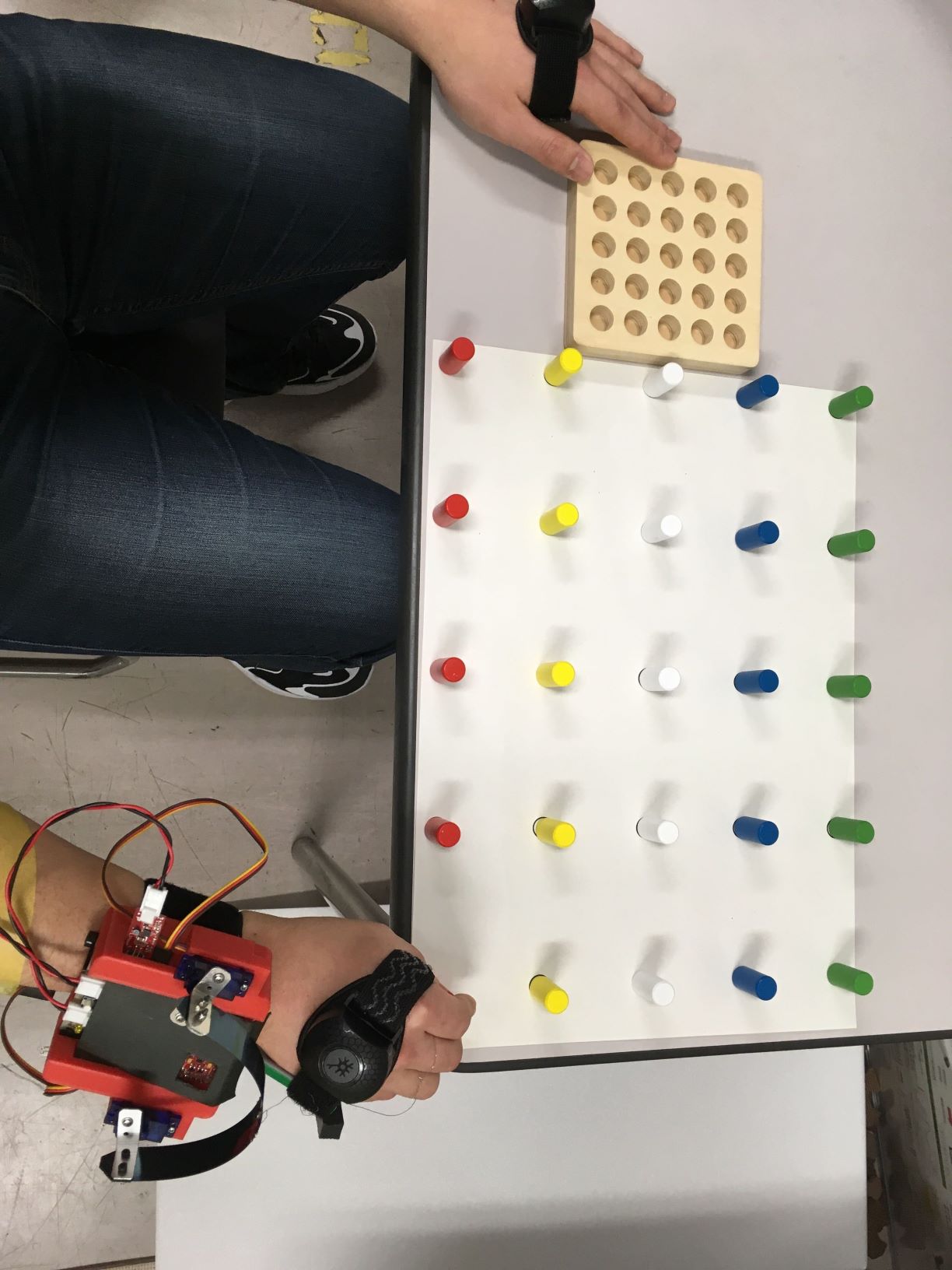
■人の手関節
人は日常生活からスポーツ、遊びの場面にいたるまで様々な道具を扱います。
初めて触る道具の扱いはぎこちなく、段々とスムーズになっていきます。
この「ぎこちなさ」=「固さ」と「スムーズさ」=「柔らかさ」を数値化し、
人の繊細な道具操作技能やその上達の秘密に迫ることを目指しています。
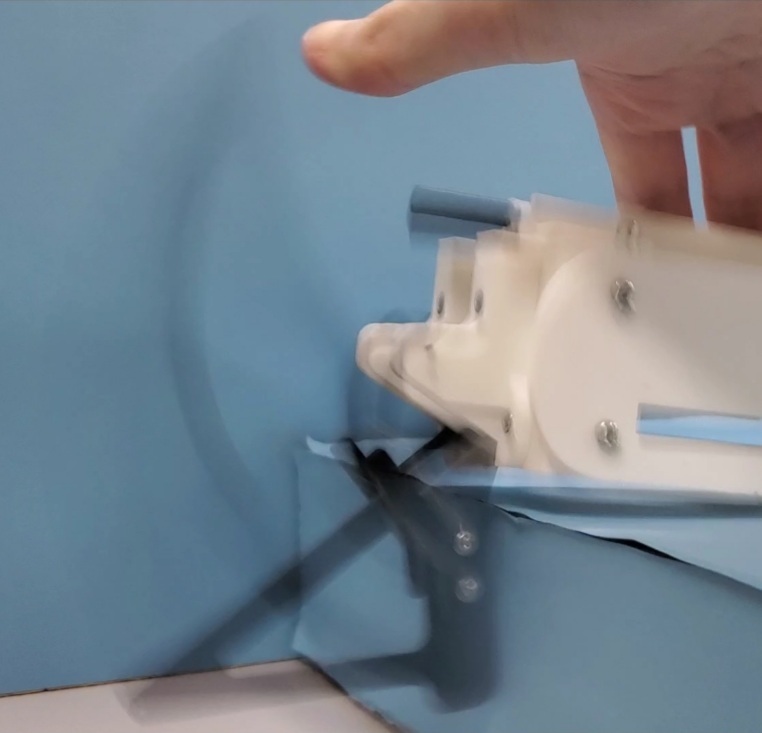
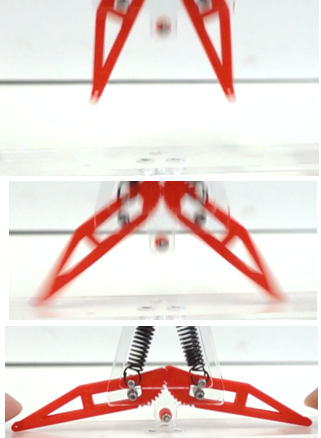
■生き物の変わった関節
生物の驚くべき身体機構に学ぶ「生物模倣(バイオミメティクス)」という研究分野があります。
当研究室ではテッポウエビやウンカといった小さな生き物の運動生成の仕組みに注目した
新しいロボット機構の開発を目指しています。
■ディジタル制御の理論と応用
人の動きの計測やロボットシステムの制御はコンピュータデバイス上で行われます。
現実世界は時間が連続的ですが、コンピュータの世界は離散的です。
計測データを正しく理解するためにも、制御アルゴリズムを正しく実装するためにも
ディジタルシステムに対する基礎理論が重要です。
当研究室では「サンプリング周期」に左右されないシステム制御理論の確立と
ステッピングモータの駆動回路を始めとする産業応用を目指しています。
メンバー
■スタッフ
講師 矢木 啓介 (keisuke.yagi.dc アット vc.ibaraki.ac.jp)
■博士前期課程生
M2 田村 幹太
M2 白田 祥規
M1 鎌戸 康行
M1 沼田 大和
M1 藤田 丈
M1 古川 歩暉
M1 宮本 陽平
■学部生
B4 行木 琉人
B4 岩﨑 由冶
B4 宇留野 智則
B4 柴田 紘志
B4 黒羽 優吾
森・矢木研究室全体のメンバーはこちら
研究成果
■学術誌論文
【2025】
- 川上巧真,西島悠喜,矢木啓介,森善一,“スコットラッセル機構を用いた人と協調する跳躍アシストデバイス,” 日本機械学会論文集, Vol. 91, No. 946, pp. 1-16, 2025.
- Yoshikazu Mori, Jo Fujisawa, Hiroto Yamanaka, Keisuke Yagi,“Development of amphibious wheelchairs for universal beaches,” Journal of Enabling Technologies, Vol. 19, No. 2, pp. 79-89, 2025.
【2024】
- Yoshinobu Onozawa, Keisuke Yagi, and Yoshikazu Mori,“Development of a Jumping Mechanism Inspired by Leg Synchronization of Planthopper,” ASME Journal of Mechanisms and Robotics, Vol. 17, No. 2, 11 pages, 2025. (Online: Sep. 2024)
【2023】
- Kiichi Tajima, Keisuke Yagi, and Yoshikazu Mori, "Development of an impulsive motion generator inspired by cocking slip joint of snapping shrimp," Bioinspiration & Biomimetics, Vol. 18, No. 6 (066002), pp. 1-14, 2023.
- Yuki Endo, Keisuke Yagi, Yoshikazu Mori, Toshinobu Takei, and Hiromi Mochiyama, “Tele-Snap: A Joint Impedance Estimation System Using Snap Motor and OpenPose for Remote Rehabilitation Diagnosis,” Advanced Robotics, vol. 37, no. 8, pp. 528-539, 2023.
【2022】
- Maxwell Kennard, Keisuke Yagi, Modar Hassan, Hideki Kadone, Hiromi Mochiyama, Kenji Suzuki, “Variable-Damper Control Using MR Fluid for Lower Back Support Exoskeleton,” IEEE/ASME Transactions on Mechatronics, pp. 1-9, 2022.
【2021】
- Keisuke Yagi, Hiroaki Muto, and Yoshikazu Mori, “Plant-Input-Mapping Discretization Method for a Feedback System in the State-Space Form,” ASME Journal of Dynamic Systems, Measurement, and Control, vol. 143, 121004, pp. 1-9, December, 2021.
- D. Isobe, N. Hori, S. Kawai, K. Yagi, and T. Nguyen-Van, “Digital Control of a Stepping Motor for Eliminating Rotation Speed Fluctuations Using Adaptive Gains,” Electronics, Vol. 10, No. 11, pp. 1-16, June, 2021.
- K. Yagi, Y. Mori, and H. Mochiyama, “Force-sensorless human joint impedance estimation utilizing impulsive force,” Advanced Robotics, vol. 35, no. 6, pp. 349-358, 2021.
【2020】
- Keisuke Yagi, “Matched-Pole-Zero Discrete-Time Model in the State-Space Representation,” IET Control Theory & Applications, vol. 14, no. 19, pp. 3270-3281, 2020.
- R. Fukai, K. Yagi, and Y. Mori, “Dynamic model for using casterboard by a humanoid robot,” Advanced Robotics, vol. 34, no. 10, pp. 648–660, May 2020.
【2019】
- 小島祥平, 森善一, 矢木啓介“パーキンソン病患者の自立起居動作補助器の開発,” ライフサポート学会誌, 31巻, 3号, pp. 108-115, 2019.
【2018】
- Keisuke Yagi, Kenji Suzuki, and Hiromi Mochiyama “Human Joint Impedance Estimation With a New Wearable Device Utilizing Snap-Through Buckling of Closed-Elastica,” IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1506-1513, 2018.
■国際会議論文
【2025】
- Shogo Matsuoka, Keisuke Yagi, and Yoshikazu Mori, "Development of a Wearable Robotic Finger System for Eating Support," Proceedings of the 2025 SICE Festival with Annual Conference (SICE2025), pp. 1636-1641, 2025.
- Shuya Sawahata and Keisuke Yagi, "Plant Input Mapping Discretization for Strictly Proper Feedback System in State Space Form," Proceedings of the 2025 SICE Festival with Annual Conference (SICE2025), pp. 545-550, 2025.
【2024】
- Shuya Sawahata and Keisuke Yagi, "Model Following Approach for Plant-Input-Mapping Discretization of a Current Regulator for Stepping Motors," Proceedings of 63rd Annual Conference of the Society of Instrument and Control Engineers (SICE2024), pp. 895–900, 2024.
- Naoya Okada, Keisuke Yagi, and Yoshikazu Mori, "A Neural Network-based Wrist Impedance Estimation Method Using EMG Signal and Wrist Angular Position," Proceedings of 63rd Annual Conference of the Society of Instrument and Control Engineers (SICE2024), pp. 202–205, 2024.
- Keisuke Yagi, "A Wearable Device for Ankle Impedance Estimation Durign Walking," 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2024), pp. 1-5, 2024.
【2023】
- Keisuke Yagi, Motoki Uchikoshi, Nobumichi Miyahara, and Yoshikazu Mori, "Estimation of Time-varying Wrist Impedance in Peg-in-hole Task," Proceedings of SICE Annual Conference, pp. 1156–1161, 2023.
- Shin Kawai and Keisuke Yagi, "Matched-Pole-Zero Model Independent of the Properness of Systems," Proceedings of 22nd IFAC World Congress, pp. 1872–1877, 2023.
【2022】
- Ryuya Tsuchida, Keisuke Yagi, and Yoshikazu Mori, "Experimental Verification of the Feedback Linearization Plant-Input-Mapping Discretization," Proc. of SICE International Symposium on Control Systems 2022, 2A2-2, 6 pages, 2022.
- Keisuke Yagi, Shohei Ito, and Y. Mori, "Development of a Boots-type Perturbation Device for Ankle Joint Impedance Estimation," Proc. of IEEE/SICE International Symposium on System Integration 2022, pp. 543-546, 2022.
【2021】
- K. Yagi, Y. Mori, and H. Mochiyama, "Estimation of Wrist Impedance in Juggling of Sticks," Presented in IEEE/RSJ International Conference on Intelligent Robots and Systems 2021 (Late Breaking Result Session), 2021.
- H. Mochiyama, T. Takei, K. Yagi, and M. Ando,“Remote Impedance Diagnosis with Snap Motor," Proc. of 2021 IEEE International Conference on Advanced Robotics and Its Social Impacts, pp. 255-258, 2021.
- Y. Mori, Y. Yonekura, E. , and K. Yagi, "Feasibility Study of a Wheel-Type Walking Assist Orthosis for Persons with Hemiparesis," Proc. of 2021 IEEE International Conference on Advanced Robotics and Its Social Impacts, pp. 100-103, 2021.
【2020】
- R. Tsuchida, K. Yagi, and Y. Mori,“A Study on the Plant-Input-Mapping Discretization for Nonlinear Control Systems Utilizing Feedback Linearization,” Proc. of SICE Annual Conference 2020, pp. 265-270.
- K. Yagi, Y. Mori, and H. Mochiyama, “Evaluation of the Impulsive Force Induced by the Snap-Through Buckling of Closed-Elastica,” Proc. of 21st IFAC World Congress, 3 pages, 2020.
【2019】
- M. Hassan, M. Kennard, K. Yagi, H. Kadone, H. Mochiyama, K. Suzuki, "MRLift: a Semi-active Lower Back Support Exoskeleton based on MR Fluid and Force Retention Technology," IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 7349-7354, 2019.
- K. Yagi and H. Mochiyama, "Human Wrist Impedance Estimation Based on Impulse Response Induced by Snap-Through Buckling of Closed-Elastica," Proc. of Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC'19), pp. 5339-5343, 2019.
- M. Hassan, K. Yagi, H. Kadone, T. Ueno, H. Mochiyama, and K. Suzuki, "Optimized Design of a Variable Viscosity Link for Robotic AFO," Proc. of Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC'19), pp. 6220-6223, 2019.
- J. Nishida, K. Yagi, M. Hassan, and K. Suzuki, "Wearable Kinesthetic I/O Device for Sharing Wrist Joint Stiffness," Proc. of Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC'19), pp. 3306-3310, 2019.
■国内学会発表
【2025】
- 田村 幹太, 矢木啓介, 森善一,岡田尚也,"機械学習によるEMG信号を用いた関節インピーダンス推定法の提案," 第26回計測自動制御学会システムインテグレーション部門講演会, pp. 3166-3171, 2025.
- 白田 祥規,矢木 啓介,松村 邦仁,森 善一, "テッポウエビのハサミに着想を得た多機能ハンドを持つ水中ロボットの開発," 第26回計測自動制御学会システムインテグレーション部門講演会, pp. 2653-2657, 2025.
- 海老澤 咲良,矢木 啓介,森 善一, "装着型デバイスを用いた歩行時の下肢関節インピーダンス推定," 第26回計測自動制御学会システムインテグレーション部門講演会, pp. 1494-1499, 2025.
- 大石裕斗, 金田礼人,山本元司,亀崎充啓,矢木啓介,中島康貴,"トレッドミルのベルト減速時の力学応答に基づく足関節インピーダンスの推定," 第43回日本ロボット学会学術講演会, RSJ2025AC, 4 pages, 2025.
- 中山孝,矢木啓介, 森善一, "ポータブルな足関節インピーダンス推定システムの開発," ロボティクス・メカトロニクス講演会2025, 2P2-K03, 4 pages, 2025.
- 磯崎蓮,松村邦仁,矢木啓介,森善一, "テッポウエビのハサミに着想を得た水中ロボット用多機能ハンドの開発," ロボティクス・メカトロニクス講演会2025, 2A2-K07, 4 pages, 2025.
【2024】
- 門脇尚音,矢木啓介,城間直司,金子和暉,小貫哲平,今野晋也 "電車を利用する搬送ロボットのアーム遠隔操作システムの実証実験," 第25回計測自動制御学会システムインテグレーション部門講演会, pp. 1224-1228, 2024.
- 海老澤咲良,矢木啓介, 森善一, "歩行時の下肢関節インピーダンス推定システムの開発," 第25回計測自動制御学会システムインテグレーション部門講演会, pp. 2737-2742, 2024.
- 松岡聖悟,矢木啓介, 森善一, "指型ウェアラブルデバイスを用いた食事支援システムの開発," ロボティクス・メカトロニクス講演会2024, 1P1-D01, 4 pages, 2024.
- 矢木啓介, "足関節インピーダンスをオンラインで推定可能なウェアラブルデバイスの開発," ロボティクス・メカトロニクス講演会2024, 1P2-D09, 4 pages, 2024.
【2023】
- 小ノ澤義伸,矢木啓介, 森善一, "ウンカ幼体の小型跳躍ロボットの開発," ロボティクス・メカトロニクス講演会2023, 1A1-F09, 4 pages, 2023.
- 松岡聖悟,矢木啓介, 森善一, "直感的操作が可能な指型ウェアラブルデバイスの開発," ロボティクス・メカトロニクス講演会2023, 2A1-C05, 4 pages, 2023.
- 遠藤友基,矢木啓介, 森善一, 竹囲年延, 望山洋, "瞬発力ベースの関節インピーダンス推定法を応用した簡易痙縮評価システムの検討," 第24回計測自動制御学会システムインテグレーション部門講演会, pp. 3112-3116, 2023.
- 門脇尚音,矢木啓介,城間直司,金子和暉,小貫哲平,泉岳志,今野晋也 "電車を利用する自律搬送ロボットのアーム操作システムの開発," 第24回計測自動制御学会システムインテグレーション部門講演会, pp. 373-378, 2023.
- 海老澤咲良,矢木啓介, 森善一, "装着型デバイスを用いたトレッドミル歩行時の膝関節インピーダンス推定," 第24回計測自動制御学会システムインテグレーション部門講演会, pp. 3023-3027, 2023.
- 中山孝,矢木啓介, 森善一, "実環境での運動タスクに応用可能な下肢関節インピーダンス推定システムの提案," 第24回計測自動制御学会システムインテグレーション部門講演会, pp. 3117-3120, 2023.
【2022】
- 岡田尚也,矢木啓介, 森善一, "機械学習による姿勢・表面筋電位情報を用いた関節インピーダンス推定法," 第40回日本ロボット学会学術講演会, RSJ2022AC2C1-2, 4 pages, 2022.
- 宮原宣道,矢木啓介, 森善一, "ペグインホールタスクを題材とした人の運動軌道と運動意識に関する研究," 日本機械学会2022年度茨城講演会, 1 pages, 2022.
- 田島貴一,矢木啓介, 森善一, "テッポウエビのCocking Slip Jointを模した高速運動デバイスの性能向上のための改良と運動解析," ロボティクス・メカトロニクス講演会2022, 2A1-F01, 4 pages, 2022.
- 小ノ澤義伸,矢木啓介, 森善一, "ウンカ幼体の股関節構造に着想を得た小型跳躍機構の開発," ロボティクス・メカトロニクス講演会2022, 2A1-F07, 4 pages, 2022.
- 遠藤友基, 矢木啓介, 森善一, 竹囲年延, 望山洋, "スナップモータとOpenPoseを利用したリモート関節インピーダンス推定," 第66回システム制御情報学会研究発表講演会, pp. 590-595, 2022.
【2021】
- 打越元紀, 宮原宣道,矢木啓介, 森善一, "Peg-in-Hole作業中の手関節インピーダンス推定," ロボティクス・メカトロニクス講演会2021, 2P2-I02, 4 pages, 2021.
- 田島貴一,矢木啓介, 森善一, "テッポウエビのハサミ関節構造を模した高速運動デバイスの開発," ロボティクス・メカトロニクス講演会2021, 2P3-I01, 4 pages, 2021.
【2020】
- 伊藤星平, 矢木啓介, 森善一, "ダイレクトドライブ型の装着型デバイスを用いた運動中の足関節インピーダンス推定," 第21回計測自動制御学会システムインテグレーション部門講演会, pp. 1930-1934, 2020.
- 矢木啓介, 森善一, 望山洋, "道具を操る曲芸における人の手関節の使い方," 第38回日本ロボット学会学術講演会, RSJ2020AC3J1-02, 3 pages, 2020.
- 遠藤雅和, 打越元紀, 矢木啓介, 森善一, "障害物を利用した登坂を行うヘビ型ロボットの開発," 日本機械学会2020年度茨城講演会, 4 pages, 2020.
- 伊藤星平, 矢木啓介, 森善一, "周波数応答法に基づく足関節の機械インピーダンス推定," 日本機械学会2020年度茨城講演会, 4 pages, 2020.
- 矢木啓介, 森善一, 望山洋, "弾性体の飛び移り座屈機構を利用した人関節インピーダンスの力センサレス推定," 第25回ロボティクスシンポジア, pp. 290-292, 2020.
【2019】
- 武藤寛明, 矢木啓介, 森善一, "閉ループ特性を保存するディジタル再設計法の状態空間表現への拡張," 第62回自動制御連合講演会, 1F3-04, 6 pages, 2019.
- 矢木啓介, 森善一, 望山洋, "人間関節インピーダンス推定のための閉ループ弾性体の飛び移り座屈機構で生じる瞬発力の評価," 第62回自動制御連合講演会, 1G4-05, 4 pages, 2019.
■受賞
澤畑嵩也,成績優秀学生,茨城大学大学院理工学研究科,2026.
海老澤咲良,優秀講演賞,第26回計測自動制御学会システムインテグレーション部門講演会,2025.
矢木啓介,ベストデモンストレーション表彰,日本機械学会ロボティクス・メカトロニクス部門,2025.
小ノ澤義伸,ROBOMECH表彰(学術研究分野),日本機械学会ロボティクス・メカトロニクス部門,2024.
遠藤友基,優秀学生賞,計測自動制御学会,2024.
海老澤咲良,優秀学生賞,計測自動制御学会,2024.
海老澤咲良,優秀講演賞,第24回計測自動制御学会システムインテグレーション部門講演会,2023.
田島貴一,成績優秀学生,茨城大学大学院理工学研究科,2023.
土田竜也,優秀学生賞,計測自動制御学会,2022.
矢木啓介, 部門若手奨励賞, 計測自動制御学会システムインテグレーション部門, 2020.
■その他(解説等)
望山洋, ハサンモダル, 矢木啓介, 鈴木健嗣, "スマートメカニクス:ロボット関節における柔と剛の融合," 日本ロボット学会誌, Vol. 38, No. 10, pp. 926-933, 2020.
リンク
・茨城大学
・工学部
・機械システム工学科
・ロボメカラボラトリー(森善先生の研究室)
茨城大学工学部 機械システム工学科 矢木研究室
〒316-8511 茨城県日立市中成沢4-12-1
|top | Research | Member | Publication |